第一个机器人与在T-DT实验室的时光
项目简介
本文记录了我参与的第一个机器人,制作时间是2022年10月。本机器人制作目的是为了通过东北大学T-DT创新实验室的校园赛,并通过校园赛进入实验室。在本项目中担任机械设计岗位。机器人获得了优秀设计奖,成品机器人如下图所示: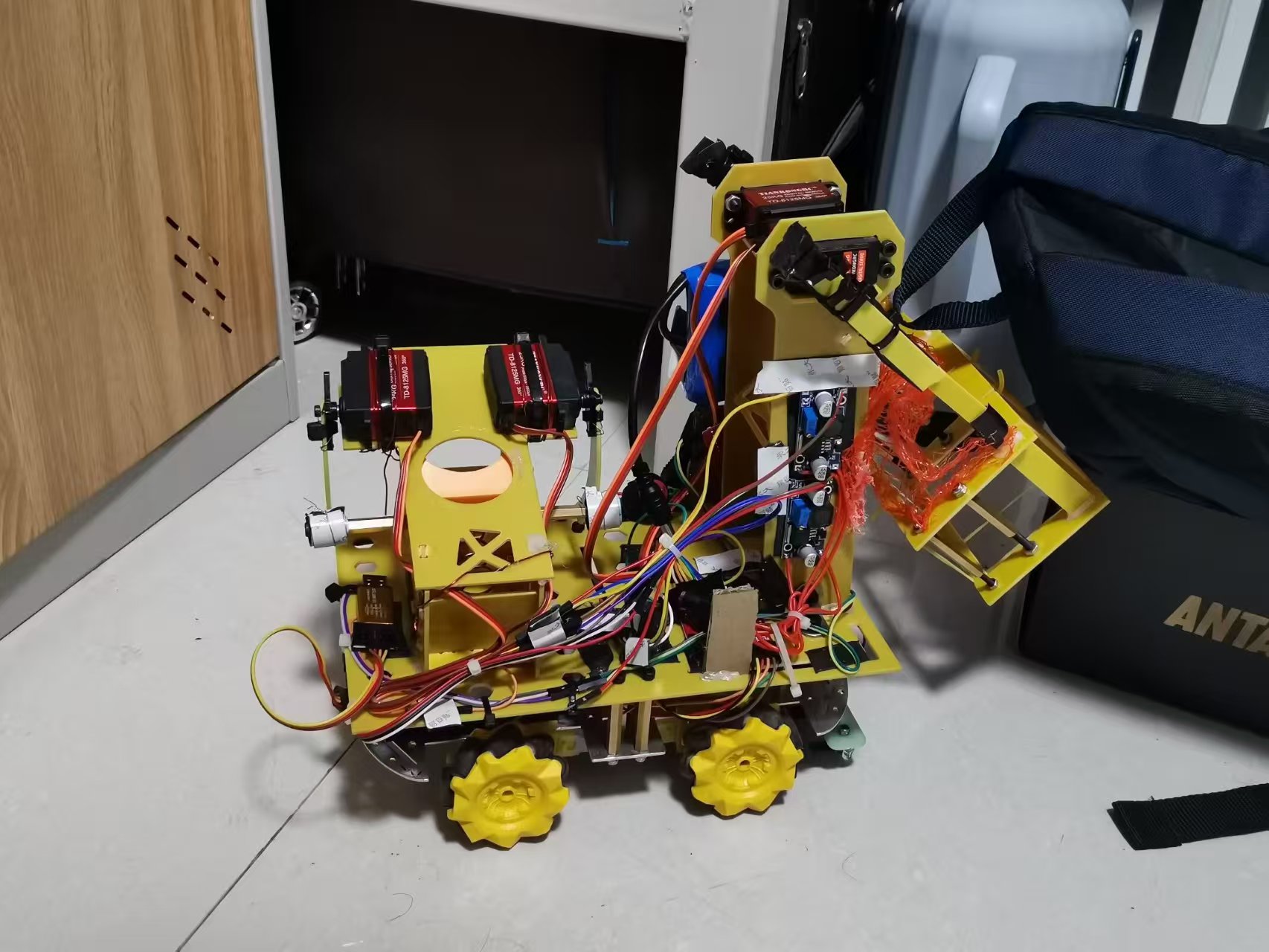
项目技能
利用sw对电机,舵机,底盘等结构件进行建模。
利用力学知识与对机械设计的学习完成小车的设计并在sw中建模。
拥有基础的机加工能力,包括:钻孔,3D打印,cnc编程加工,雕刻机加工,打磨等。
拥有对机械零件简单的力学仿真能力以验证零件是否可用。
机器人任务
机器人要求有两个,一个是取球,一个是投球,在上场前每个队都有100积分,购买发射用小球每个30积分,发射用小球投中目标得80分,没投中得0分,取球每个小球30分。取球线路有黑色胶布做引导线,机器人用巡线模块可完成规定区域运动。
发射小球位置在取球线路终点。成绩以积分排名计算,积分相同以时间排名。(以上是当时主要规则,由于时间过远,当时得比赛规则手册没有保存,只能根据记忆回忆。相应比赛现场视频只在b站上直播没有保存相当可惜。)
机器人设计
机器人分三个设计部分,传动部分,取球部分,和发射部分。
传动部分:利用普通小车底盘搭配tt电机(带编码器版本。电控可以利用pid较为准确得控制机器人的速度和方向),
取球部分:利用两个舵机控制整个机构,坏消息是如果舵机下降角度过大,作用力会对舵机和舵机与机构连接部分造成影响。好消息是没有使用横扫机构(需要机器人结构做的很大)没有使用机械臂(对电控要求过高),采用自动捡球框作为设计灵感。只需要舵机转角转动两次即可实现取球和放球入框。电控只需要光敏传感器判断机器人靠近取球点让舵机转动即可完成目标,机械结构上也没有过多要求。利用橡皮筋、铜柱和玻纤板。即可完成搭建。利用红色网布的可折叠特点和受重力凹陷的特点,为球体提供可变化的进入机器人内部的轨道。同时取球结构的成功率高达90%。同场最高。
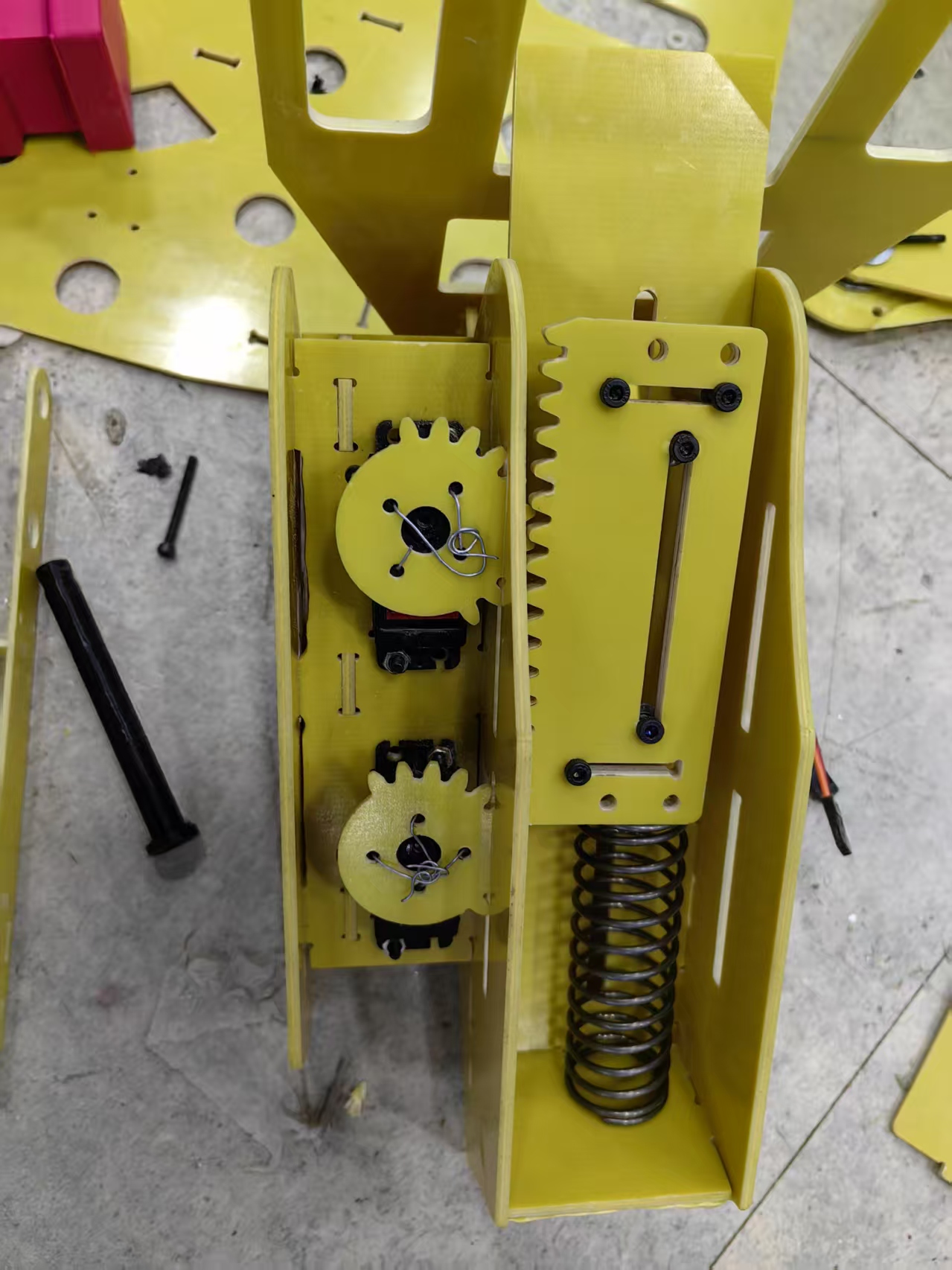
发射部分:利用两舵机与弹射机构搭建,主要原理是利用舵机从外部带动内部打印件压缩弹簧(事实证明这是一个很低效的方法,因为连接部分强度不够很容易造成结构的损坏,同时由于摩擦消耗的能量过多,发射距离不够远。)在第二年辅助学弟设计类似发射结构的时候提出了一种基于缺齿齿轮的设计方案,让整体强度更高,球体发射距离更远,根据同角度同高度计算,缺齿齿轮的发射距离是弹簧的三倍。重复次数比弹簧的多5倍。
以下是机器人在测试时取球部分的视频(以下视频微信可能无法打开,建议利用浏览器打开)
在T-DT实验室的时光
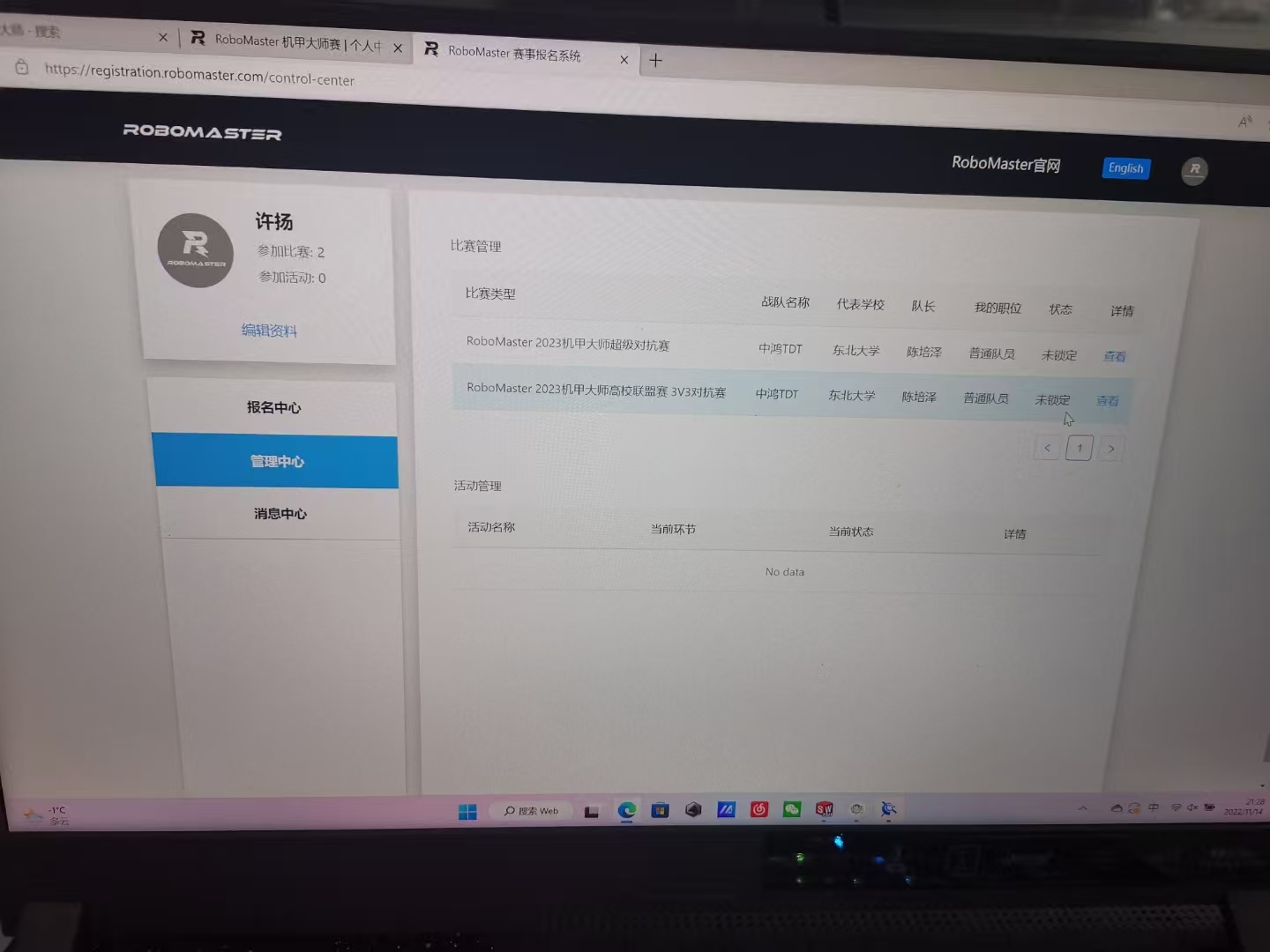
在参与第六届机甲大师校园赛后,我对机器人产生了浓厚的兴趣,于是在2023年10月,我加入了T-DT实验室,开始了我的机器人之旅。以下是收到通知的截图

在实验室中,我学习了机器人的基本知识,包括机器人的结构、控制、传感器等。同时学长向我们介绍了上一届比赛用机器人的设计优点与缺点,根据对每个机器人的分析和对其在比赛中的定位,我选择做步兵云台的机械设计。
接到的第一个任务是改进yaw轴的设计,原先的yaw轴由于云台有伸缩功能,导致在伸长状态下机器人无法运动,一旦运动yaw轴会因力臂增大,导致惯性力矩增大,导致yaw轴结构部分应力集中发生断裂。因此解决方案是增大底盘与yaw轴的连接面积,优化形状,将伸长部分的横截面积增大,利用铝件进行强度补充。后测试符合预期,在整体重量增加200g的条件下实现云台在伸长状态下仍有运动能力。
第二个优化是对弹丸发射枪口的优化,我的目标是延长枪的使用寿命,(由于弹丸的发射,传统3d打印材料制作的枪,定位性能会随弹丸与定位结构的摩擦,定位能力下降)基于这点,我们考虑用铝件通过加工中心铣削出两块板做上下定位,缺点是加工时间过长,在我离队时,我手中的枪在8米左右散射面积小于四分之一张A4纸。
以下是在T-DT实验室中记录的一些图片(由于机器人不让拍照,所以下列图片并没有机器人的内容)